ASPINA電動ロボットハンド - 考える手で賢く自動化 -

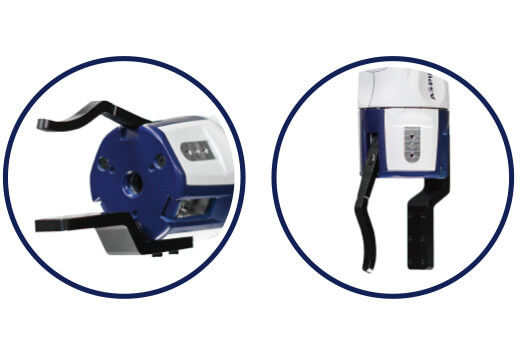
角型ワークにおすすめの2爪ハンド
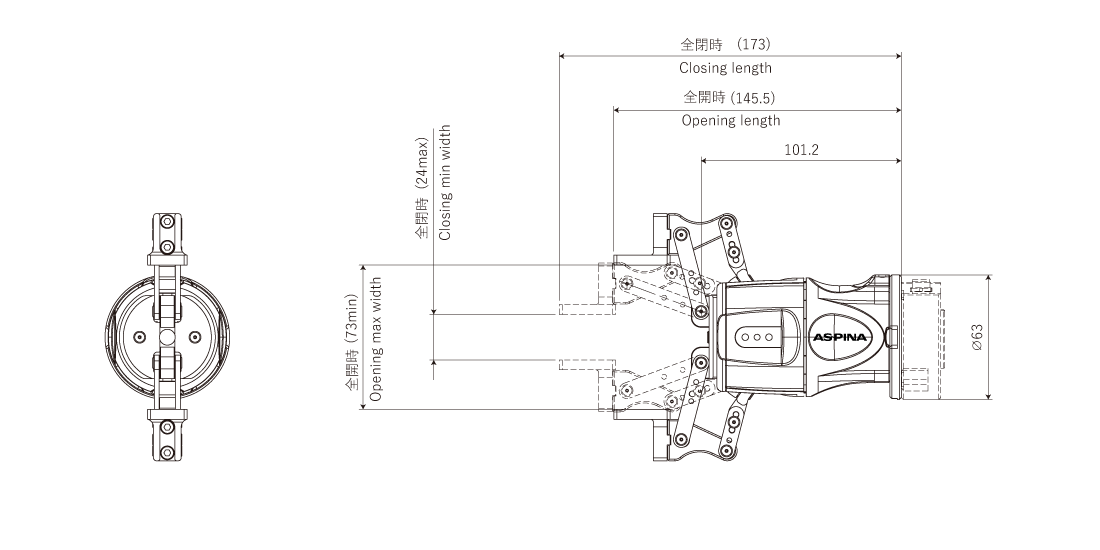
やさしくつかめる最大開口幅 73mm、
把持力 11Nのモデルです。

把持力11Nで1kg程度のものをやさしくつかめます。
また開口幅も73mmと大きいため、様々なワークの把持が可能です。

トルク、位置、速度をそれぞれ設定可能です。
トルクは0.5%単位、位置と速度は0.1%単位で調整が可能です。
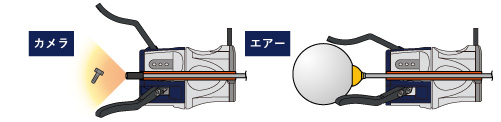
追加機能として、押し込み運転や把持対象の落下検知も可能です。
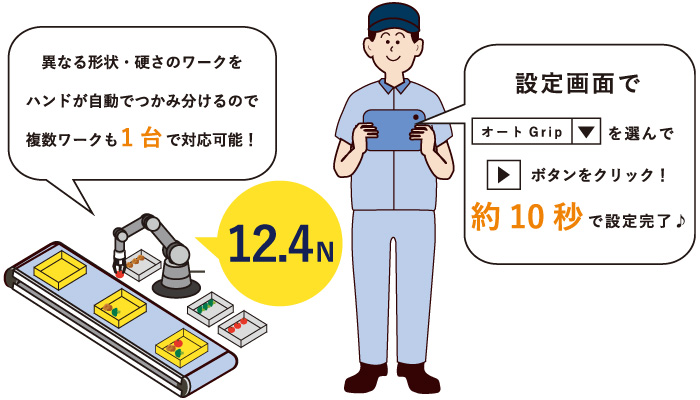
異なる形状・硬さのワークをロボットハンドが自動でつかみ分けます。
中空構造を利用して様々なカスタムが可能
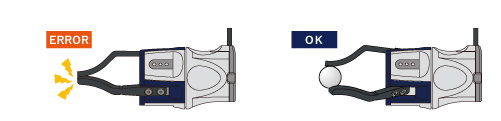
把持エラー範囲設定により把持エラー出力可能
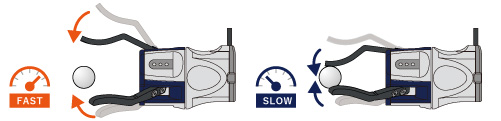
1回の動作中に2パターンの速度が設定可能
電動2爪ロボットハンドARH205D-P40と各社協働ロボットとの接続方法や制御方法についてご紹介します。プラグ&プレイは順次開発予定です。詳しくはお問い合わせください。






その他の協働ロボット、産業ロボット、PLCなどの自社製造装置との接続は、Modbus RTUによる通信制御またはI/Oで制御できます。
ASPINA電動ロボットハンドで様々なワークを把持する様子を動画でご紹介。
オプションの爪パーツや2爪/3爪の違いや、安定してつかめる50Nモデルなどの他機種の活用事例もご覧になれます。
ロボットハンド設定や各メーカーロボットへの接続などご不明点がありましたら、お気軽にお問い合わせください。
デモ機のお貸出しについても承ります。