ASPINA電動ロボットハンド - 考える手で賢く自動化 -
ASPINA電動ロボットハンドについてのよくあるご質問をまとめました。カテゴリごとにまとめてありますのでご覧ください。
電動ロボットハンドとは、ロボットアームの先端部分に取り付けられる人の手のような動きをする電動の機械です。ロボットアームの他にも工程自動化のための専用機器・生産設備に取り付けられることもあります。また電動グリッパ、電動チャック、電動エンドエフェクタとも呼ばれます。
空気圧動作のハンドが苦手とする柔らかいワークも、人の手のように潰さずしっかり優しくつかみます。細かい把持力調整で、人の隣で安全に協働作業することができます。空気圧動作のハンドの様に圧縮エアを供給する必要がないためエアーコンプレッサーも不要で、省エネルギー化に貢献します。
把持力をハンドが自動で調整する機能です。詳しくは下記リンクをご覧ください。
2爪と3爪の仕様から選択できます。詳しくは下記リンクをご覧ください。
把持対象物としては円形や円柱形が得意です。また、球体や厚みのあるものなども得意です。内径把持も対応するためドーナツ形の把持にも適しています。下記リンクの活用事例、ケーススタディも参考ください。
把持対象物としては基板などの角型が得意です。小箱などのパレタイズも得意です。下記リンクの活用事例、ケーススタディも参考ください。
デモ機のお貸し出しを行っていますので、お気軽にご相談ください。
「カスタム爪サービス」でお客様それぞれのご要望に沿った最適な爪を設計・ご提案を承ります。お気軽にご相談ください。
可動部の爪は取り替え可能です。またオプション座面には固定爪などの取り付けが可能です。
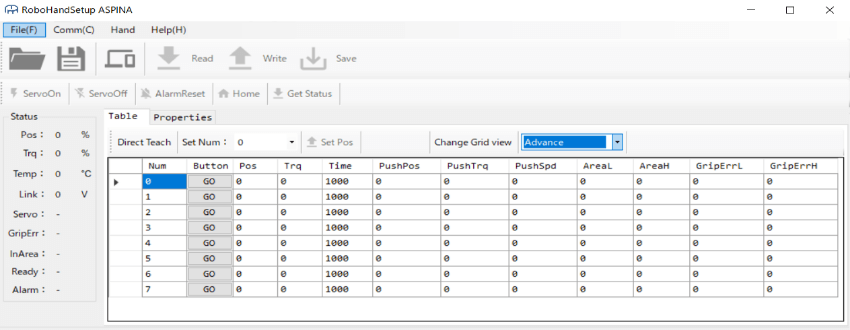
主に爪の開閉位置(0.1%刻み)、トルク(把持力、0.5%刻み)、開閉時間(1ms刻み)が調整できるため、滑らかに動作します。
エラー範囲を設定することで把持エラーを検知して出力できます。
二段階運転に対応しており、タクトタイムを短縮しながらやさしくつかめます。
販売していません。お客様にてご用意ください。
回転します。内径活用の場合は、摩擦防止のためスリーブ等をお客様にてご用意ください。
ASPINA電動ロボットハンドは通信制御とI/O制御に対応しています。通信制御は各ロボットとのプラグインソフトウェアで制御する方法と、Modbus RTUで制御する方法があります。
詳しくは下記リンクをご覧ください。
接続するロボットの種類と制御方式で異なります。詳しくは下記リンクをご覧ください。
ユニバーサルロボットの操作用ソフトウェア「URCaps」で設定します。
使い方など詳しくは下記リンクをご覧ください。
ティーチングペンダントでの操作方法は下記リンクをご覧ください。
専用プラグイン「TMコンポーネント」をロボットにインストールする事で操作できます。使い方など詳しくは下記リンクをご覧ください。