ASPINA電動ロボットハンド - 考える手で賢く自動化 -
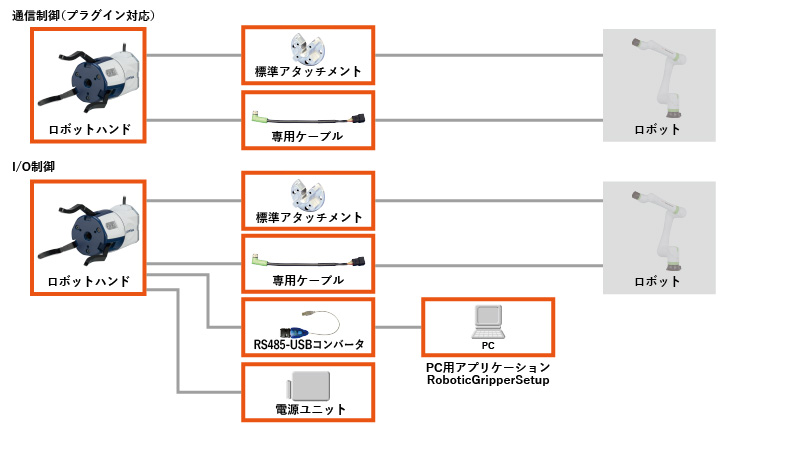
通信制御:
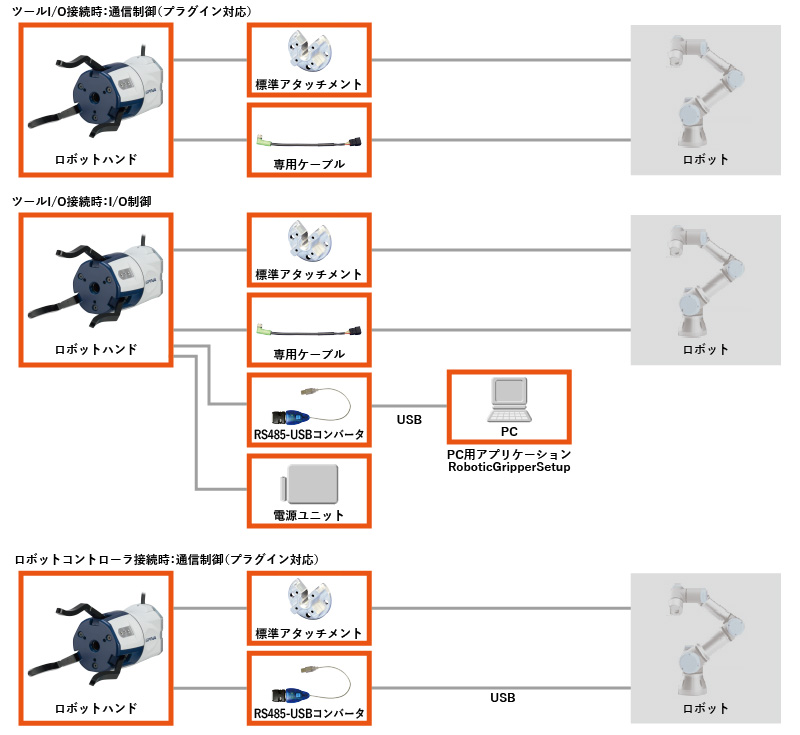
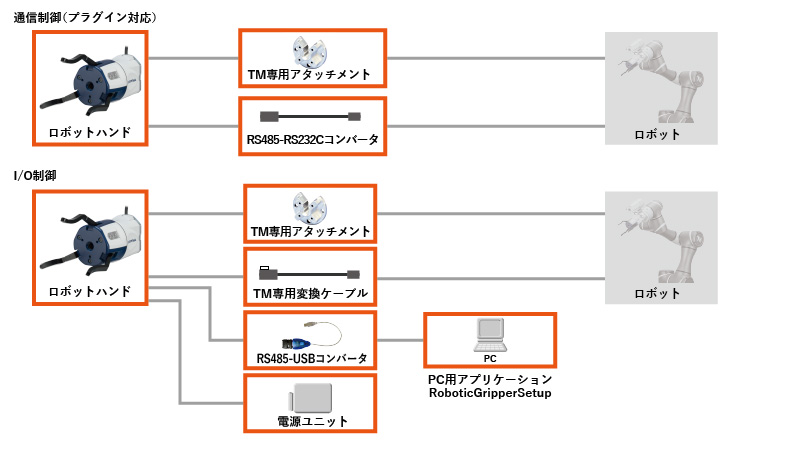
1動作毎に動作指令を送る事ができます。動作指令は位置、把持力、開閉速度、把持チェックを動作毎に切り替えられます。Plug&Playに対応しているロボットは各ロボット専用プラグインソフトウェアをインストールする事で簡単に制御できます。未対応の各社ロボットに対してもModbus RTUを用いて設定することで制御可能です。
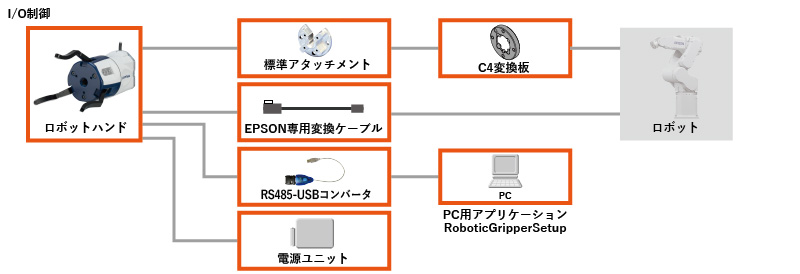
I/O制御:
InputのON/OFFによって、PC上の専用アプリで設定した動作パターンを呼び出します。入力ピンは1pin(2パターン)、2pin(4パターン)、3pin(8パターン)の設定が可能です。位置、把持力、開閉速度、把持チェックは専用アプリで事前に設定可能です。
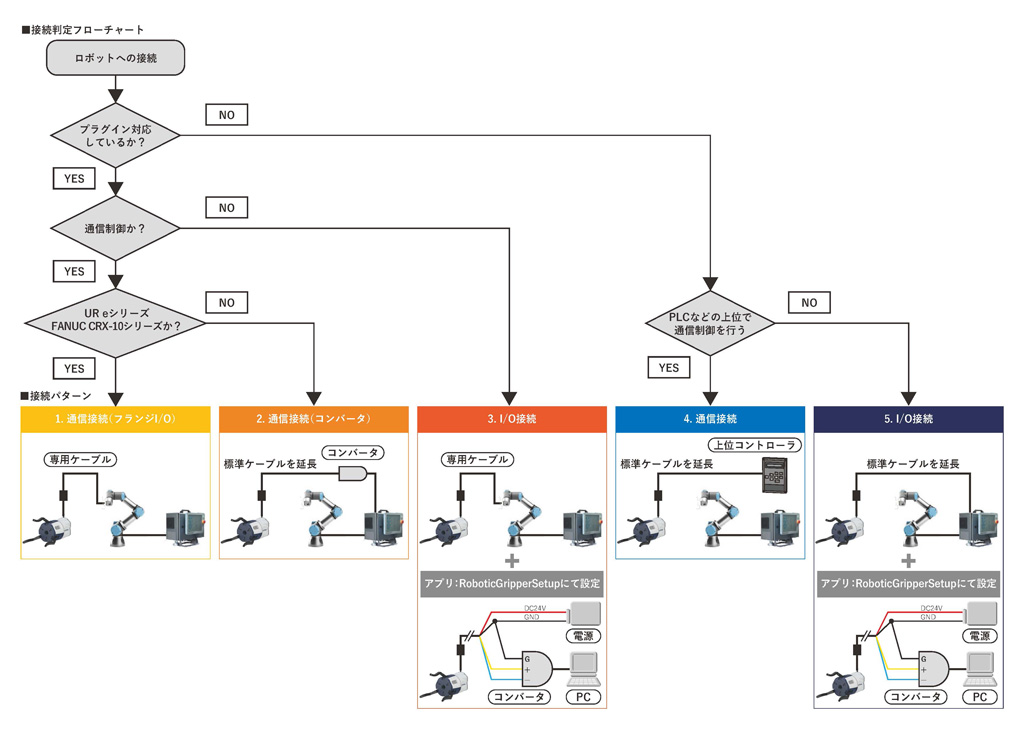
接続判定フローチャートを参考に”接続パターン”を選択してください。
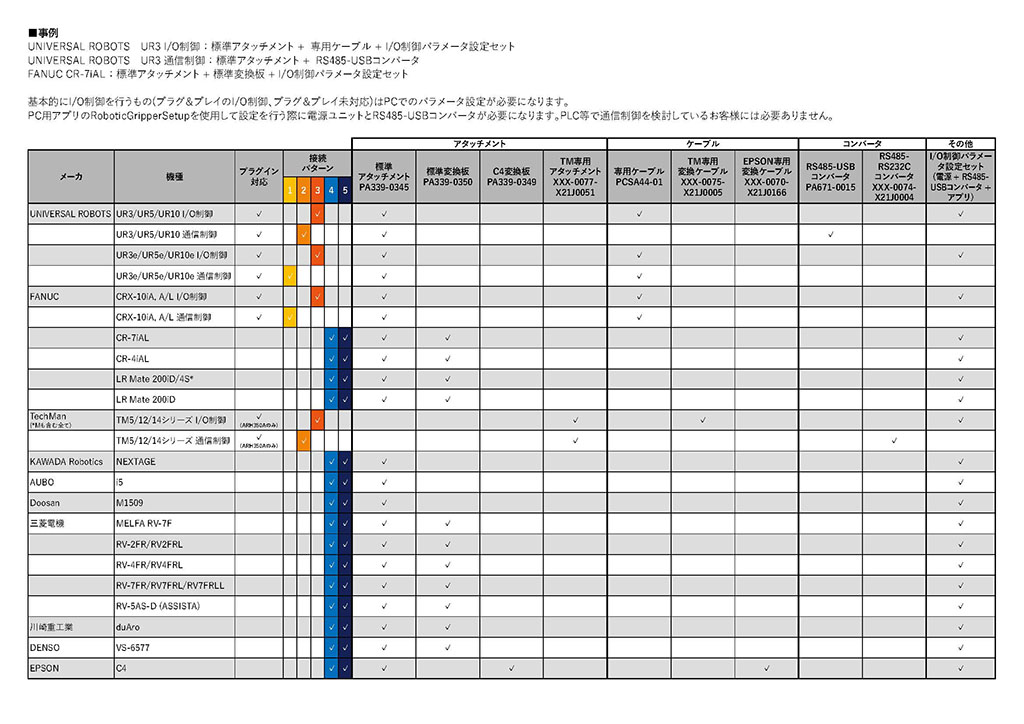
その後一覧表から接続するロボットの”メーカ・機種”と”接続パターン”よりオプションを選択してください。
ユニバーサルロボット
Techman Robot
ファナック
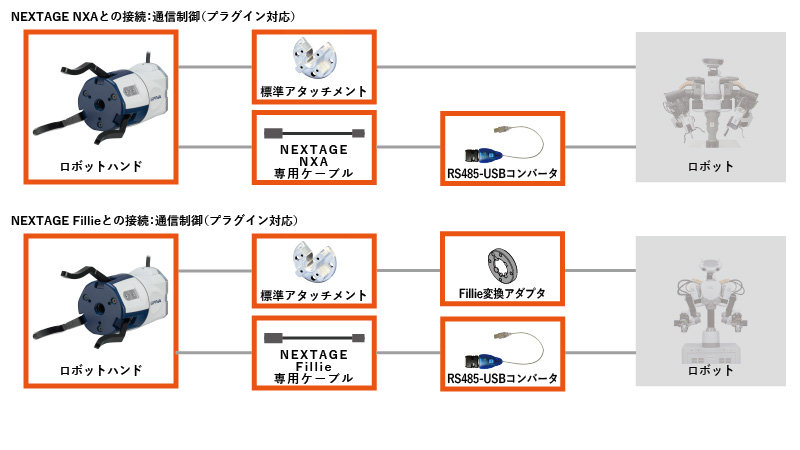
カワダロボティクス
エプソン
ロボットハンドと各社ロボットの接続については、ロボットとの接続ページをご確認ください。
ロボットハンド設定や各メーカーロボットへの接続などご不明点がありましたら、お気軽にお問い合わせください。
デモ機のお貸出し、お客様のワークの把持テストについても承ります。