ASPINA電動ロボットハンド - 考える手で賢く自動化 -
柔らかいものから固いものまで、ワークの形状を崩すことなくつかめます。製品についてのご質問、デモ機のレンタルなどお気軽にお問い合わせください。

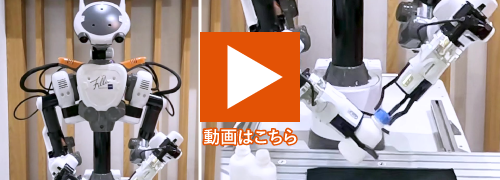
把持対象 : ペッパーミル、チューブ、ドレッシングボトル
ASPINA電動ロボットハンドを装着したNEXTAGE Fillie(カワダロボティクス)が、音声指示を受けてペッパーミルやチューブ、ドレッシングボトルなど様々な調味料を上手につかみ分け、ふりかけます。

把持対象 : 金属の塊、モータドライバ、プラスチックケース、スポンジ、梱包箱など
ASPINA電動ロボットハンドのラインナップの中で、4つある2爪モデルのそれぞれの特徴と選定方法をご紹介します。
把持対象 : ボトル容器、ボトルキャップ(フタ)
カワダロボティクスのNEXTAGE FillieとASPINA電動ロボットハンドを組み合わせて、ボトル容器の組立と分解作業を行っています。


把持対象 : 布、折りたたみ治具
ASPINA電動ロボットハンドとカワダロボティクスのヒト型ロボット NEXTAGE Fillieを組み合わせ、洗濯物をたたみます。
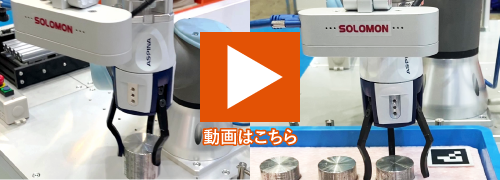
把持対象 : 金属部品
ユニバーサルロボット(UR)の協働ロボットアーム「CB3」に装着したASPINA電動ロボットハンドとSOLOMONカメラ「AccuPick LM」を組み合わせ、ランドマークをカメラで捉えることで、ワークを把持する位置を補正できます。

把持対象 : リモコン、油性ペンなど
ASPINA電動ロボットハンドとカワサキロボットの人共存型双腕スカラロボット「duAro2」を組み合わせて、異なる形状のワークを自動調整してつかみ分けしています。
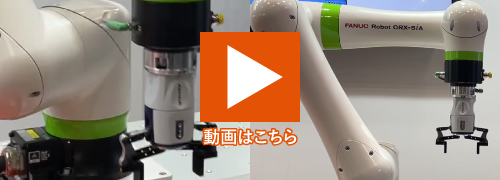
把持対象 : プラスチックケース、基板、ケーブル束、金属部品など
ASPINA電動ロボットハンドとファナック協働ロボットを組み合わせて、色々なものを把持する事例を紹介しています。
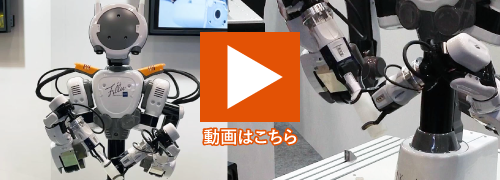
把持対象 : スプレー容器
カワダロボティクスのNEXTAGE FillieとASPINA電動ロボットハンドを組み合わせて、スプレー容器の組立と分解作業を行っています。


把持対象 : 金属部品
「ASPINAロボットハンド」、自動搬送ロボット「AspinaAMR」を連携させた製造ラインの自動化を紹介しています。




把持対象 : モータコイル、モータ基板、など
Techman様の協働ロボットとASPINAロボットハンドで色々なものを把持する事例を紹介しています。
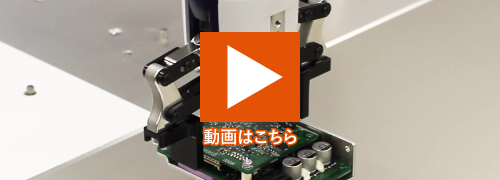
把持対象 : 金属の塊、基板、プラスチックケース、ケーブル束など
電動2爪ロボットハンドは四角形のワークに適しているので、基板や箱物などを安定してつかむことができます。

把持対象 : 金属の塊、基板、スポンジ、プラスチックケース、ケーブル束など
安川電機様の人協働ロボットとASPINAロボットハンドで色々なものを把持する事例を紹介しています。


把持対象 : ネジ、金属重り、ベアリング、束ねたケーブル
オートグリップ機能により、対象ごとに把持力を自動調整しているので1つの設定で様々な形状・重さのワークを把持することが可能です。

把持対象 : 金属製トレー、樹脂部品など
カワダロボティクス社製のヒト型協働ロボット"NEXTAGE Fillie"と"ASPINAロボットハンド"、自動搬送ロボット"AspinaAMR"が連携し、部品の組立~搬送をイメージできるデモンストレーションを行っています。





把持対象 : 金属部品、ゴムプーリベルト
カワダロボティクス社製ロボット"NEXTAGE"に"ASPINAロボットハンド"を装着し金属部品の組立作業を行っています。

把持対象 : 饅頭
ロボットハンドで饅頭をピラミッド型に積上げてみました。
「力の強いグリッパーだと重いものがつかめる反面、柔らかいものを潰してしまう・・・」そんなお悩みをお持ちではないでしょうか?

把持対象 : バラ緩衝材
ロボットハンドの幅広爪を用いて箱入れ作業を行ってみました。
箱入れ作業が面倒・・・。頻度は多くないが人の手で箱入れ作業をしている。緩衝材などをざっくりつかめる爪がなくて・・・などのお困りごとはございませんでしょうか?

把持対象 : ダンボール小箱
ロボットハンドのエアーアタッチメントと固定爪(2爪)を用いて段ボール小箱を掴んでみました。
「爪を入れるスペースがないがエアーだけだとワークを傾けた時に落下してしまう・・・。」このようなお悩みはございませんでしょうか?

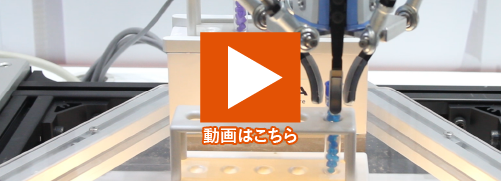
把持対象 : 積み木
ロボットハンドの固定爪(2爪)オプションを用いて積み木を掴んでみました。
オプション爪により、3爪から2爪への交換が容易に可能になりました。「丸形は3爪だけど長方形のモノもしっかり掴みたい」そんなお客さまにぴったりの製品です。
製品についてのご質問などご不明点がありましたら、お気軽にお問い合わせください。
デモ機のお貸出しについても承ります。