ASPINA電動ロボットハンド - 考える手で賢く自動化 -
新機能「オートグリップ」で重りと紙コップを把持してみました。
「オートグリップ」は、1つの動作指令で異なる種類の複数のワークをつぶさずにつかむことができる新機能です。
オートグリップ機能ON /OFFでの把持動作を比較しています。
人間なら簡単にできる「つかむ」という動作、実はロボットハンドにはとても難しかったりします。
最初の工程でつかめても、次の工程で失敗する事が有ります。
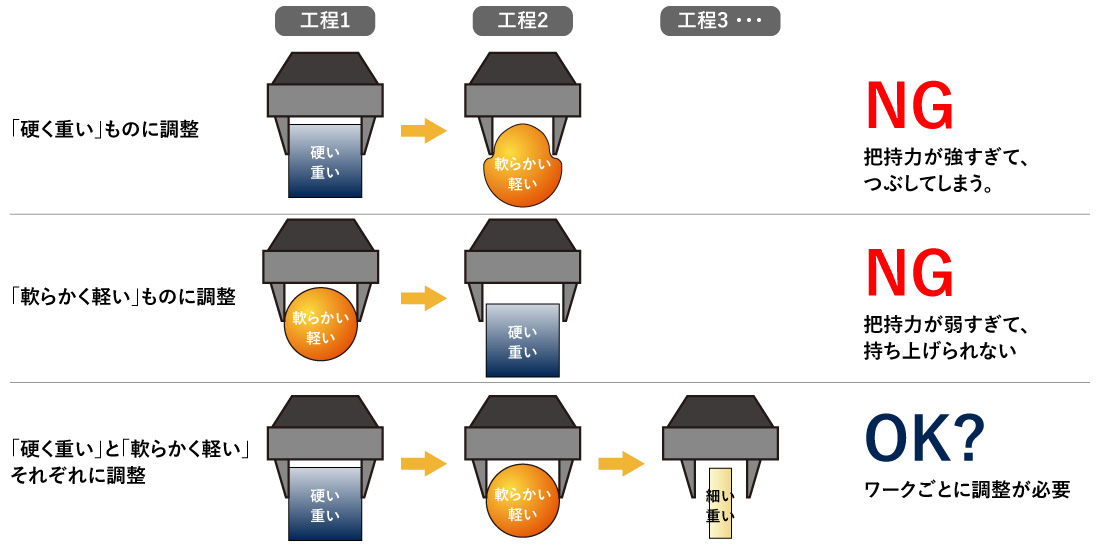
電動3爪ロボットハンドの新機能「オートグリップ」なら、
ひとつの爪、ひとつの動作指令で「硬・軟・大・小・形状」の異なるワークをつかむことが可能です。
爪がワークに接触した時に検知した結果をもとに、つかむ力を最適化します。
カメラやセンサなどは不要。ロボットハンドが自立的に把持力を調整してワークをつかみます。

今後も様々なモノの把持に挑戦していきますが、お客様からの「こんなモノは掴めるの?」というご要望にチャレンジしてまいりますので、お気軽に下記フォームからお問合せください。