ASPINA電動ロボットハンド - 考える手で賢く自動化 -


ASPINA電動ロボットハンドは、協働ロボット向けのエンドエフェクタ(グリッパ)です。
大きなストローク、調整可能な把持力、中空構造などの機能を備え、電動ならではの細かな把持力調整で人の手のようにしっかり優しくつかみます。
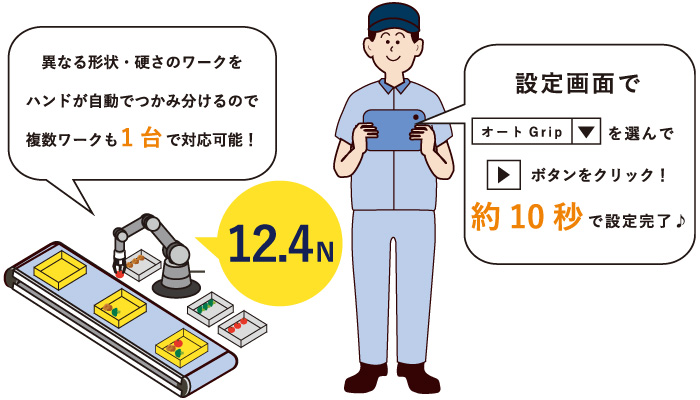
オートグリップ機能により、異なる形状や硬さのワークを自動調整してつかみ分け、1台で複数のワークに対応可能です。
丸ものワークには3爪モデル、角型ワークには2爪モデルをご用意し、カスタム爪設計サービスでお客様の「つかむ」要望に寄り添います。
☑ 十年後には作業者が不足するから自動化したい
☑ ロボットハンドを導入してみたが思ったようにつかめない
☑ 自動化を検討しているが業務が多忙で思うように自動化が進まない
ASPINAの電動ロボットハンドだからできる3つのこと

空気圧動作のハンドが苦手とする柔らかいワークも、人の手のようにしっかり優しくつかみます。細かい把持力調整で、人の隣で安全に協働作業することができます。

ワークを確実に把持できるようにワーク形状・条件に応じた最適なカスタム爪の設計サービスもあります。

硬いものも柔らかいものも1回で把持可能。その時の把持力を瞬時に「見える化」できるため、簡単な微調整ですぐに生産ラインに運用できます。
☑ 人手不足、働き方改革、少子高齢化を背景とした「人が行う作業の自動化」
☑ 少量多品種生産化を背景とした「フレキシブルな生産ラインの実現」
こうしたニーズの高まりから、従来の産業用ロボットでは対応が難しかった人間のように複数の作業に対応でき、人と協力して作業が行える「協働ロボット」の導入が進んでいます。
協働ロボットのエンドエフェクタには、従来の産業用ロボットよりも人の手に近い動きが行える「汎用的なロボットハンド」が求められます。

小型でもおおきなストローク(φ143)を確保。
※ARH350A(写真)の場合。
広い可動範囲で、大小さまざまなワークを1つのハンドで内径でも外径でも把持可能です。

ステッピングモータを用いたサーボシステムで動作速度・開閉位置などを制御し、柔・硬に合わせた把持力を調整可能です。

中心に穴が開いた中空構造なので、様々なカスタマイズが可能です。

ASPINA電動ロボットハンドと各社協働ロボットとの接続方法や制御方法についてご紹介します。プラグ&プレイに対応した協働ロボットなら設定も簡単です。







オートグリップ機能の対応状況についてはお問い合わせください。プラグアンドプレイについては各社ロボットに順次対応予定です。対応メーカー以外の協働ロボットや産業ロボットへの接続にはI/OまたはModbus RTU(RS-485)で制御可能です。
ASPINA電動ロボットハンドで様々なワークを把持する様子を動画でご紹介。
オプションの爪パーツや2爪/3爪モデルの違い、各協働ロボットメーカーと接続した把持の様子などの事例もご覧になれます。


ロボットハンド設定や各メーカーロボットへの接続などご不明点がありましたら、お気軽にお問い合わせください。
デモ機のお貸出しについても承ります。