ASPINA電動ロボットハンド - 考える手で賢く自動化 -
ユニバーサルロボットにはロボットの先端に「ツールI/O」というコネクタがあります。
このコネクタは電源供給や制御信号をおくるものですが、シリーズによって使用できる制御信号が異なります。
ユニバーサルロボットのシリーズと「ツールI/O」での制御方法
| シリーズ | 通信制御 | I/O制御 | 備考 |
|---|---|---|---|
| eシリーズ | 〇 | 〇 | |
| ※専用ケーブル(Opt) | ※専用ケーブル(Opt) | ||
| CBシリーズ | - | 〇 | 通信制御をする場合はロボットコントローラに接続します。 ※標準ケーブル(1m)が同梱されます。延長ケーブルはオプションです。 |
| ※専用ケーブル(Opt) |
ロボットハンド製品別ユニバーサルロボット制御方法
| シリーズ | 製品型番 | 通信制御(プラグイン) | I/O制御 | |
|---|---|---|---|---|
| 2爪モデル | ARH250D-P40 |  |
〇 | 〇 |
| ARH250D-P80 |  |
|||
| ARH205D-P40 |  |
〇 | 〇 | |
| ARH205D-P80 |  |
|||
| 3爪モデル | ARH350A |  |
〇 | 〇 |
| ARH305B |  |
〇 | 〇 | |
| ARH305A |  |
〇 | 〇 | |
結線について詳しくはQ&Aの「ユニバーサルロボットとの接続で、どのような通信・制御ができますか?」をご覧ください。
| 種類 | リンク先 |
|---|---|
| プラグアンドプレイ用プラグインと取扱説明書 | ダウンロードページへ |
| プラグインからの設定について | Q&Aページへ |
| 把持チェックと二段階運転の設定について | Q&Aページへ |
| I/O制御用PCアプリケーション | ダウンロードページへ |
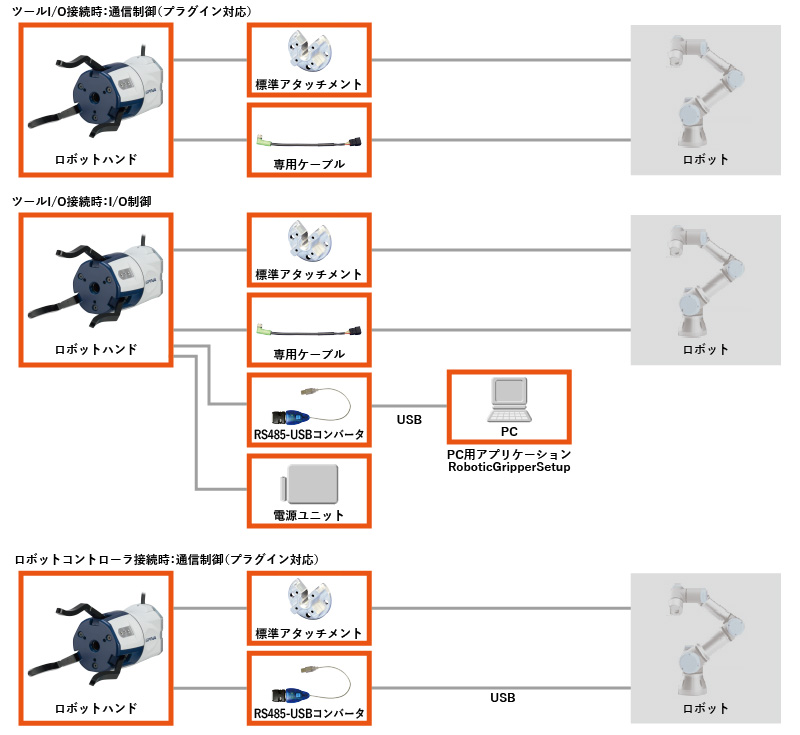
I/O制御を行う場合は基本的にPCで専用アプリからパラメータ設定が必要になります。
PC用アプリを使用して設定を行う際に「電源ユニット」と「RS-485 - USBコンバータ」が必要になります。



ロボットハンド設定やユニバーサルロボット等の各メーカーロボットへの接続などにご不明点がありましたら、お気軽にお問い合わせください。
デモ機のお貸出し、お客様のワークの把持テストについても承ります。