ASPINA / robotic gripper - To grasp everything


Most of the competitor products correspond one-to-one with one end effector. ASPINA robotic gripper utilizes the structure of 3 fingers and can grasp multiple types of objects with one gripper.
It is a highly functional end effector that can comply with Plug & Play for collaborative robots and grasp various shapes and soft objects.

Large stroke φ143 with small gripper size
*In case of ARH350A(Above photo).
Wide range of stroke achieves to grasp various large and small size workpieces by one gripper.

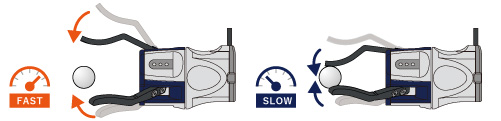
The servo system using a stepping motor controls the operation speed and open/close position.
In addition, the gripping force can be adjustable for the softness or hardness material.

Hollow channel structure in the center of robotic gripper to expand possibilities
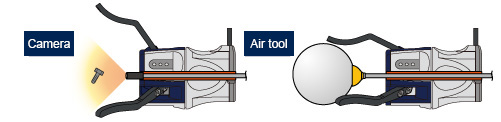
Taking advantage of hollow channel structure, passing cable or tube and installing cameras, sensors and air tools.
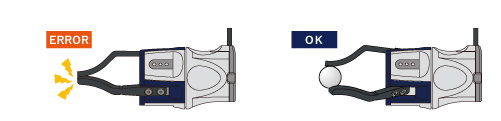
Gripping error can be output by range of setting.





Compliant robot manufacturers will be added in order.
Connection method is I/O or RS485.