ASPINA電動ロボットハンド - 考える手で賢く自動化 -


好評いただいている電動ロボットハンドに2爪モデルを追加いたします(3月下旬より受注開始予定)。
2種類の把持力、2種類の爪の計4機種のラインナップをご用意。もちろん、オートグリップ機能も搭載しております。
① 協働ロボット用電動ロボットハンド
② コントローラ内蔵で省スペース
③ 2種類の把持力×2種類の爪を選べるので対応できるワークが広い
④ トルクは0.5%、位置と速度は0.1%で調整可能
⑤ オートグリップ機能搭載で形が変わりやすいワークも簡単設定で把持できる
| モデル | ARH205D-P40 |
ARH205D-P80 |
ARH250D-P40 |
ARH250D-P80 |
|---|---|---|---|---|
| 最大開口幅 ※1 | 73mm | 150mm | 73mm | 150mm |
| 把持力 ※2, 3 | 11N | 5.5N | 110N | 55N |
| 最大把持重量 ※3, 4 | 600g | 300g | 2,000g | 1,000g |
| 最大可搬重量 ※5 | 1,000g | 3,000g | ||
| 開閉速度(最大ストローク時) | 0.25~10sec | 0.8~10sec | ||
| 最大フィンガ長 (爪取り付け面より) | 40mm | 80mm | 40mm | 80mm |
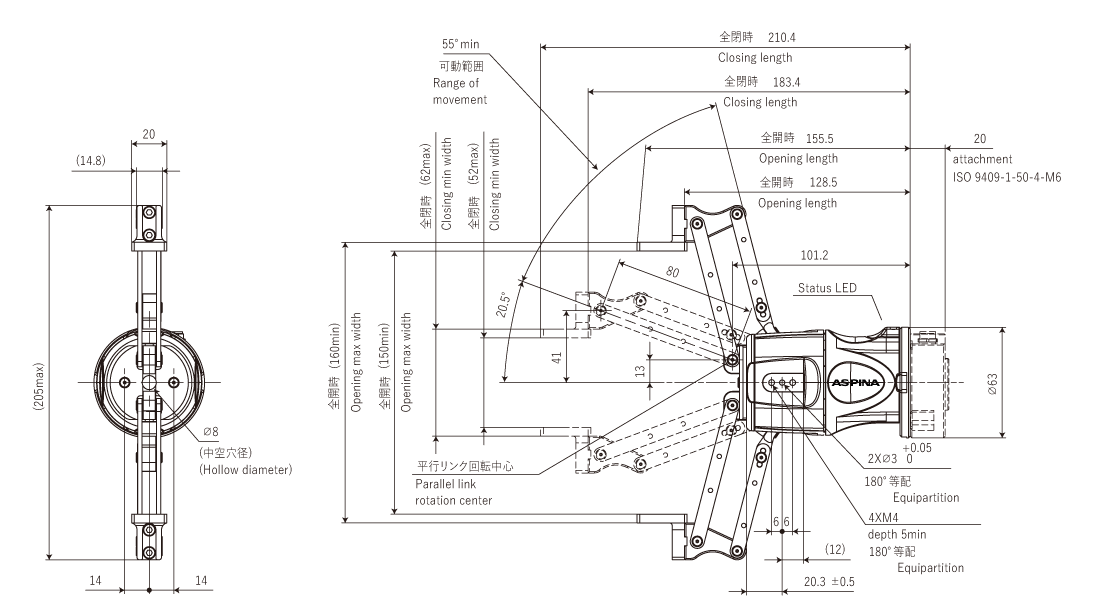
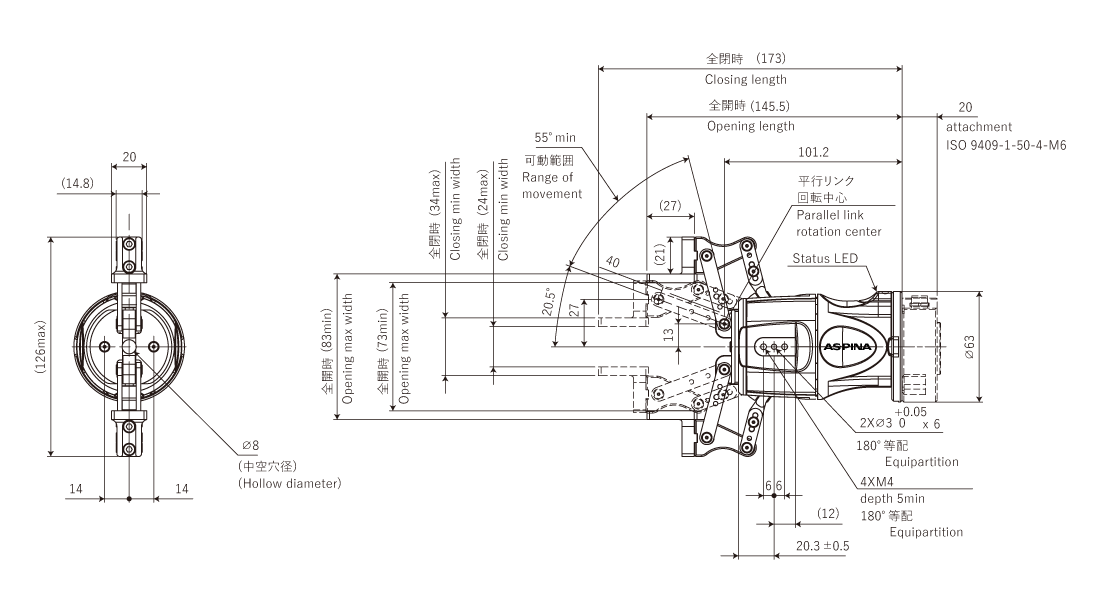
| 本体サイズ ※6 | φ63×173 | φ63×210 | φ63×173 | φ63×210 |
| 動作寿命 | 1,000万開閉(無負荷)以上 | |||
| 電源電圧 | 24V±10% | |||
| 最大電流(定格動作時) | 0.6A MAX Peak | |||
| 重量 ※7 | 745g | 762g | 745g | 762g |
| IPコード | IP2X | |||
| 使用温度 | 0~+40℃ | |||
| 保存温度 | -10~+50℃ | |||
| Digital I/F | デジタル入力 x 2, デジタル出力 x 2 | |||
| 入力 | ●ON/OFF指令 ●原点復帰指令 ●動作指令 ●停止指令 他 | |||
| 出力 | ●ON/OFF信号 ●Ready(運転/待機)信号 ●アラーム信号 ●把持範囲エラー信号 他 | |||
| Serial I/F | RS-485 (Modbus RTU) | |||
| 表示LED | 緑 / 赤 / 橙 | |||
| 保護機能 | ●電圧異常 ●温度異常 ●パラメータ設定異常 他 | |||
| 主な接続方法 | 各ロボットメーカーPlug&PlayまたはI/OまたはRS-485 | |||
ARH250D-P80 / ARH205D-P80
ARH250D-P40 / ARH205D-P40
プラグ&プレイ対応は順次開発予定
ASPINA シナノケンシ株式会社
ロボットハンドお問い合わせフォーム