ASPINA電動ロボットハンド - 考える手で賢く自動化 -
ASPINA電動ロボットハンドは、ワークをつかみ損ねた場合の対応機能「グリップエラー出力」を備えています。
同じ作業工程でもワークの位置や形状のバラツキにより、つかみ損ねる可能性があります。
ASPINA電動ロボットハンドはその際に「グリップエラー」として信号を出力できます。
ワークを正常につかんだ場合、グリップエラー出力はOFFのままです。
逆に、ハンドが目標位置に到達したが何もつかまなかった場合、グリップエラー出力はONになります。
出力ON / OFFにより、ワークのつかみ損ねを判定することができます。
【活用例】
■ロボットの動作停止 :
万が一、ワークをつかみ損ねた場合にグリップエラー出力がONになり、ロボットの動作を停止させることができます。
■別の動作への切り替え :
ワークの供給が途絶えた場合にグリップエラー出力がONになり、別の動作への切り替えを行います。新しいワークを供給するなどの柔軟な対応が可能です。
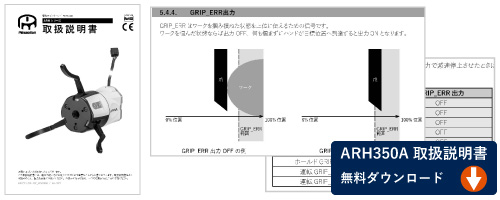
グリップエラー出力(GRIP_ERR出力)の設定について
各ロボットハンドの取扱説明書にてご説明しております。
取扱説明書はフォームより入手いただけます。
【電動ロボットハンド 取扱説明書】
■ (参考)右図は「ARH350A」取扱説明書です。
■ 取扱説明書では、GRIP_ERRと記載されています。
■ 30ページ「GRIP_ERR出力」の項目をご参照ください。
今後も様々なモノの把持に挑戦していきますが、お客様からの「こんなモノは掴めるの?」というご要望にチャレンジしてまいりますので、お気軽に下記フォームからお問合せください。

把持対象 : 金属部品
「ASPINAロボットハンド」、自動搬送ロボット「AspinaAMR」を連携させた製造ラインの自動化を紹介しています。

把持対象 : 金属の塊、基板、スポンジ、プラスチックケース、ケーブル束など
安川電機様の人協働ロボットとASPINAロボットハンドで色々なものを把持する事例を紹介しています。