ASPINA電動ロボットハンド - 考える手で賢く自動化 -

川崎重工 duAro1/2の制御方法
| シリーズ | 製品型番 | I/O制御 | |
|---|---|---|---|
| 3爪モデル | ARH350A |  |
〇 |
| 種類 | リンク先 |
|---|---|
| クイックスタートマニュアル | ダウンロードページへ |
| I/O制御用PCアプリケーション | ダウンロードページへ |
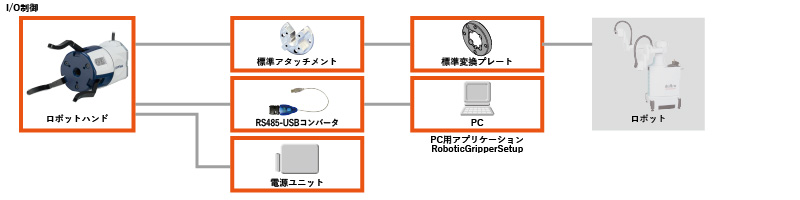
I/O制御を行う場合は基本的にPCで専用アプリからパラメータ設定が必要になります。
PC用アプリを使用して設定を行う際に「電源ユニット」と「RS-485 - USBコンバータ」が必要になります。

ロボットハンド設定や川崎重工等の各メーカーロボットへの接続などにご不明点がありましたら、お気軽にお問い合わせください。
デモ機のお貸出し、お客様のワークの把持テストについても承ります。