ASPINA / robotic gripper - To grasp everything
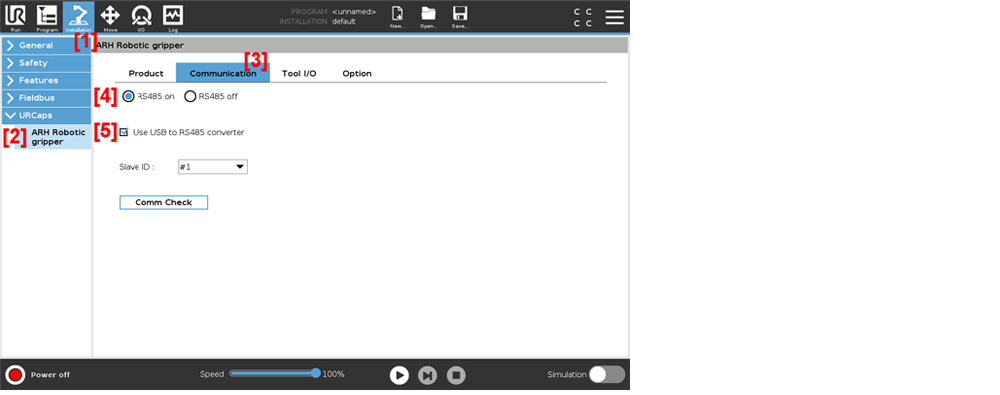
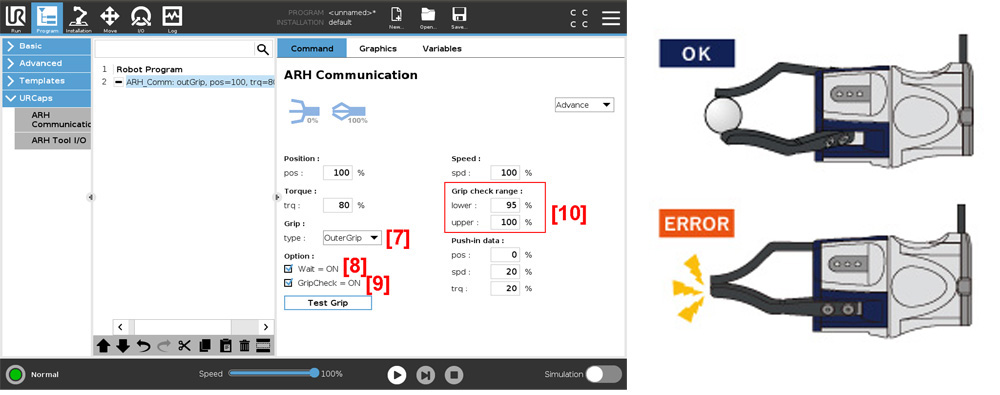
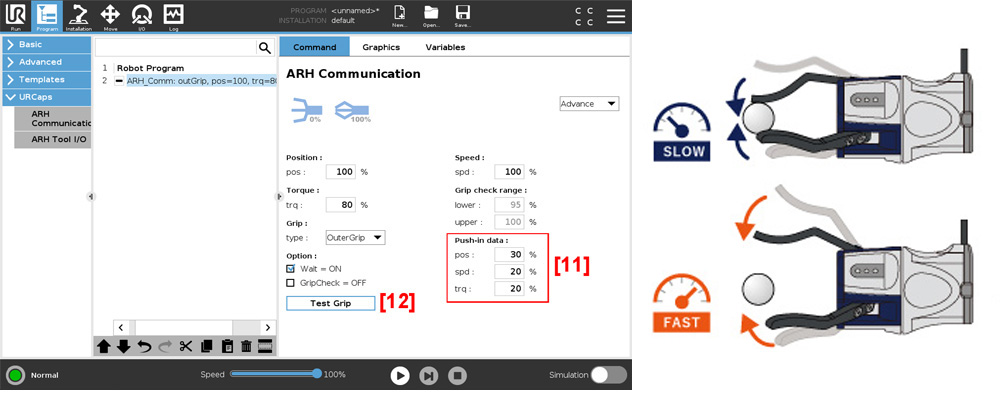
The following example shows the setting method for communication control. This section describes communication settings, grip error (check), and push-in operation (two-step operation).
The robotic gripper operation with communication
In case of using USB-RS485 converter