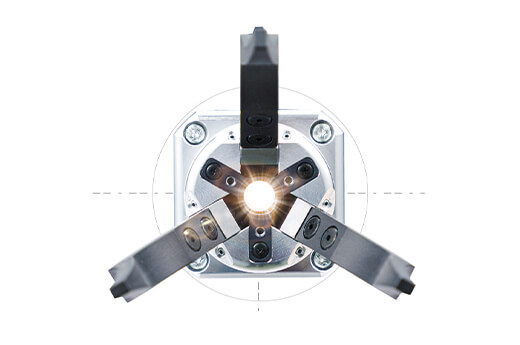
3fingers robotic gripperARH305A
(Sales Pending)
Compact design with integrated controller.
The digital input signal is easy to use.
Wide range of stroke φ116 achieves to grasp small workpieces such as needles and cotton swabs. In addition, it can grasp up to 500g weight depending on the customized finger.
Features
Large stroke
Large stroke φ116 with small gripper size
Wide range of stroke achieves to grasp various large and small size workpieces by one gripper.
Adjustable gripping force
Gripping force, operating speed and position control by servo system using stepping motor
Hollow channel structure to expand the width of work process.
Hollow channel structure in the center of robotic gripper to expand possibilities
Functions
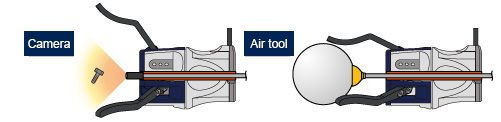
Hollow channel structure
Taking advantage of hollow channel structure, passing cable or tube and installing cameras, sensors and air tools.
Gripping error
Gripping error can be output by range of setting.
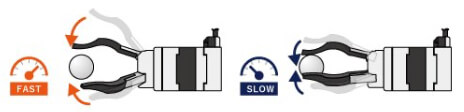
Operation of two speed stages
Two kinds of speeds can be set during one operation
Specifications
- Maximum opened diameter
- φ116mm
- Gripping force *1
- 5N
- Maximum workpiece weight *2
- 50g
- Maximum workpiece weight *3
- 300g
- Opening and closing speed
- 0.25〜100sec
- Maximum finger length
- 70mm
- Positioning repeatability
- ±50μm
- Dimensions
- 143x42x42mm
- Lifetime
- 10 million open/close times (No load)
- Input voltage
- 24V±10%
- Maximum current (Rated operation)
- 0.6A MAX Peak
- Weight
- 470g
- Compliant robot manufactures *4
- Optional attachments for each robot will develop in series
- Operation ambient temperature
- 0~+40℃
- Storage temperature
- -10〜+50℃
- IP code
- IP2X
- Digital I/F
- Selectable 4 digital I/F from 4 digital I/F inputs and 2 outputs
- Input
- ●ON/OFF ●Home ●Operation ●Stop command, etc.
- Output
- ●ON/OFF ●Ready/Busy ●Alarm ●Gripping range error signal, etc.
- Serial I/F
- RS-485(Modbus RTU)
- Indicator
- Green/Red/Orange
- Protective function
- ●Voltage ●Temperature ●Parameter setting error, etc.
- Connection Methods
- Universal Robots : URCaps, each robot manufactures : I/O or RS-485 *5
Measuring with one finger at 30mm
At 70mm distance from the finger rotation center(The value varies by gripping items.)
At 30mm distance from the finger rotation center(The value varies by gripping items.)
If optional attachment does not comply with your robot, please contact us.
RS-485 converter is separately required.
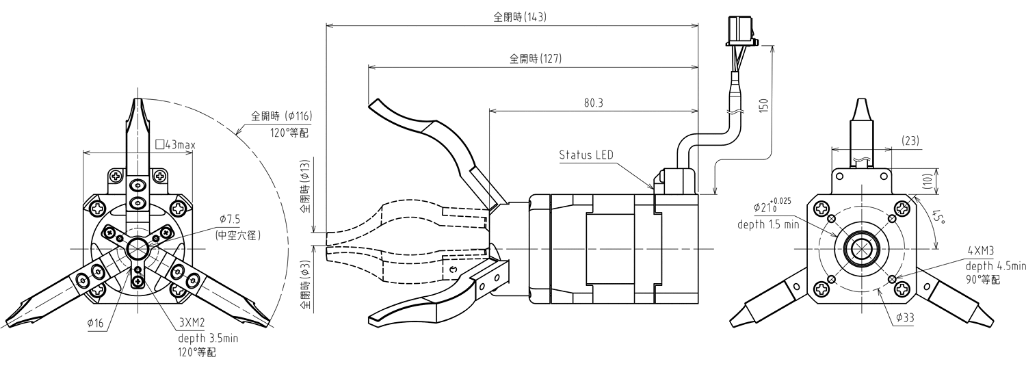
Outline
Dimension with standard finger.
Compliant robot manufactures
Collaborative robots complied with Plug & Play
Package contents
- Robotic gripper
- Cable (1m)
- Standard finger (Installed into robotic gripper)
- Finger fixing screw (Installed into robot hand)
Option
Case studies
Here are examples of case studies